AppRob NDT Module Thermography
Awards
Information
The manufacturing industry is demanding more sophisticated robotics. Currently, industrial robots automate repetitive tasks. Industry4.0, however, demands more flexible, easier to program, and smarter robots that are capable of performing tasks on a small series or single parts. This flexibility requires being able to define the tasks that the robot must do in a simple way. The programming of a robot must be able to be done in a few minutes by a person with no knowledge of robotics.
Critical composite parts in aeronautics (fuselage, wings,...) must be inspected individually. To accelerate this NDT, flash thermography is implemented because this technology has the advantage of being easily robotized.
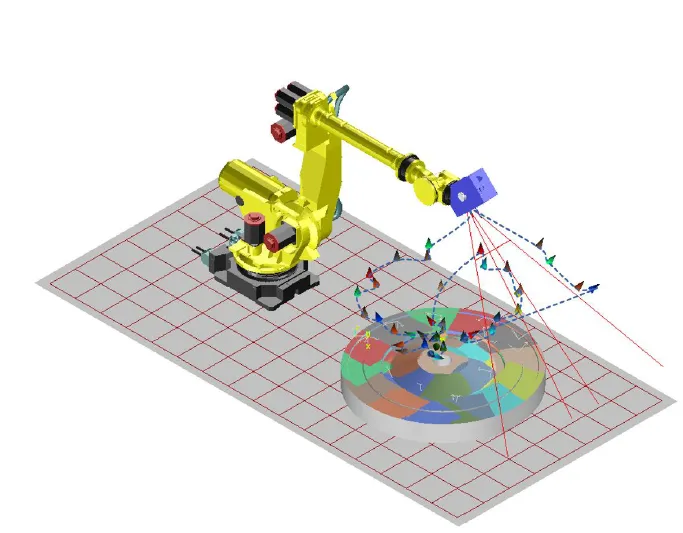
A robot is a means to move a sensor. It has no intelligence and executes a defined trajectory. Today, a human is responsible for defining the inspection path. With classic offline simulation and programming software, this operation takes 5 days for roboticists. With our software – AppRob – we offer a digital twin of the machine that reduces programming time to a few hours for experts without robotics skills. This time saving is already significant but not sufficient for us because the program obtained is always subject to human factors
Our major innovation is to have developed an algorithm which makes it possible to define the inspection trajectory that is
• Automatic: no operator intervention is required
• Optimized: the scenario includes only the necessary acquisitions.
Web page
Argument
Fin 2021, nous présentions une première maquette de notre logiciel à un grand compte de l’aéronautique. Sa marque d’intérêt est immédiat et il entame la longue procédure d’achat.
Cette année a été consacrée à la mise au point de l’algorithme d’auto-teaching. Un premier travail sur les besoins utilisateurs a été fait. Deux grands types d’algorithmes répondant aux 2 besoins identifiés ont été conçus. L’ensemble des fonctions de coût de l’algorithme ont été repensées pour s’adapter au fait que la thermographie robotisée traite des grandes pièces.
La dimension des pièces nous a également obligé à optimiser les calculs pour réduire les temps d’exécution.
Les premiers résultats sont uniquement disponibles en simulation dans une maquette numérique qui permet de vérifier l’absence de collision dans la trajectoire et que la totalité de la pièce est bien couverte.
En parallèle à ce développement, nous avons commencé à installer chez notre client grand compte de l’aéronautique notre logiciel.